We get a lot of questions about how to improve in-the-field accuracy with GNSS equipment. Many new or less-experienced users suspect that when a device is marketed to provide 10 cm or 1 cm level accuracy, that it provides that right out of the box. When you pay a pretty penny for a high-end machine that is designed for mapping, GIS, or surveying applications you expect to be able to produce the accuracy advertised on the datasheet. So all you have to do is pull it out, install your software, boot it up outside, and you are getting 1 cm accuracy, right? Wrong.
Although GNSS satellites calculate a position with a high degree of accuracy, a lot of error is introduced between the time the signal leaves the satellite and hits your receiver on the ground. The atmosphere, reflective surfaces, and electromagnetic interference can throw things off, just to name a few sources or error. These sources of error generally leave raw, autonomous GNSS positions with an accuracy rating of only 10 m or so. Besides varying quality and design among GNSS receivers’ hardware, the way we produce an accurate location is through differential correction, a process which calculates out some of that error and determines a more precise location. Differential correction can occur through various sources including other satellites or base stations on the ground.
Most GPS receivers these days support differential correction through satellite-based augmentation systems (SBAS) such as the United States’ Wide Area Augmentation System (WAAS). A recreational or lower-end professional GPS device that is WAAS enabled may provide you with 2-5 m accuracy in real-time while you are out in the field and on a professional mapping or survey-grade device it may get you down to sub-meter in good conditions. However, anything better than sub-meter real-time accuracy requires a more robust differential correction source, even with the most expensive receivers on the market.
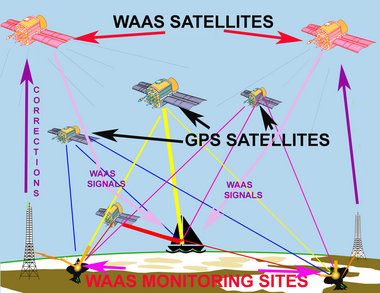
Image above courtesy of: http://www.nola.com/outdoors/index.ssf/2011/09/wide_area_augmentation_system.html
These robust differential correction sources usually consist of GPS or GNSS base stations. The principle is that a base station is mounted over a known point and continually collects GNSS data. At any given time, GNSS may tell the base station that it is at a different location than where the base knows it actually is. If the base knows it is at XYZ location, but the satellites are saying it is 30 ft to the northwest, then the base can calculate that at that time of day, in that location, there is about 30 ft of error to the northwest in the GNSS signal. From there, fancy algorithms and decades of brilliant engineering have allowed us to interpret how that error applies to our GNSS rover units in the field. You can collect data in the field at an accuracy of 1+ m with a professional device and postprocess the data later in the office with software like GPS Pathfinder Office. This allows you to apply differential corrections to your data using base data from hundreds of permanently installed base stations throughout the world. The end results can be impressive, bringing the accuracy of your positions well within factory specifications in good GNSS conditions. This method will not, however, support work flows or project requirements where you need real-time, in-the-field accuracy within 1 cm or even 1 ft.
To get real-time accuracy down to as good as 1 cm you must have a connection to a real-time differential correction source. There are a few components to this type of a solution: (a) a compatible GNSS receiver (like the Geo 7X), (b) compatible software (such as TerraSync, Positions, or TerraFlex), (c) communications between your receiver and the real-time source (internet via Wi-Fi or cellular, UHF radio) and (d) the real-time source itself. The rover hardware and software are pretty straightforward, communications add some logistics to be dealt with, and the source itself may be hard to come by. Surveyors often have their own portable base station they take to a job, but this can be complicated and very costly. Trimble’s new RTX system is a satellite-based real-time differential correction service that is broadcast over the internet or directly through satellites to produce as good as 4 cm real-time accuracy with compatible receivers. Frontier Precision has a permantenly installed base station at its home office in Jerome, Idaho that broadcasts corrections over the internet and can be accessed through an IP address, username, and password. But perhaps the most useful solutions are real-time networks (RTNs) which are often referred to as virtual reference systems (VRS). These systems provide a network of base stations that provide RTK corrections over the internet anywhere in the coverage area, resulting in up to 1-2 cm accuracy on compatible devices.

RTNs are not available everywhere, but there generally is something available in most heavily populated areas in the United States. Some networks are operated by public entities such as DOTs, and others are operated by private companies. They may cover a single city or an entire region. The size, scope, cost, and utility of these systems vary widely. Where they do exist, there may be a fee to subscribe to the service. You may be surprised to find out that there do exist some RTK base stations and GNSS RTNs in even obscure parts of the country. UNAVCO’s Plate Boundary Observatory network is extensive and many of the base stations broadcast RTK corrections for free. Below is a picture of one of their base stations.
I recently happened upon a fantastic post by GPS World that would have been nice to come across a lot earlier. Early last year they compiled a list of publicly available RTK sources including single base stations and real-time networks. CHECK THIS ARTICLE OUT! The links are there for just about any network you might need to access in the country.
Solutions
Frontier Precision provides world-class solutions for a wide variety of industries using leading products, training, technical services and more.




Products
Technical Services
If you require customized technical services and training, please contact Frontier Precision at 800-359-3703 or reach out to a local Frontier Precision location.
Training and Events
Frontier Precision offers affordable regularly scheduled certified training classes, online eLearning, webinars, as well as custom training options to meet your specific training needs.
About Frontier Precision
Contact Frontier Precision